
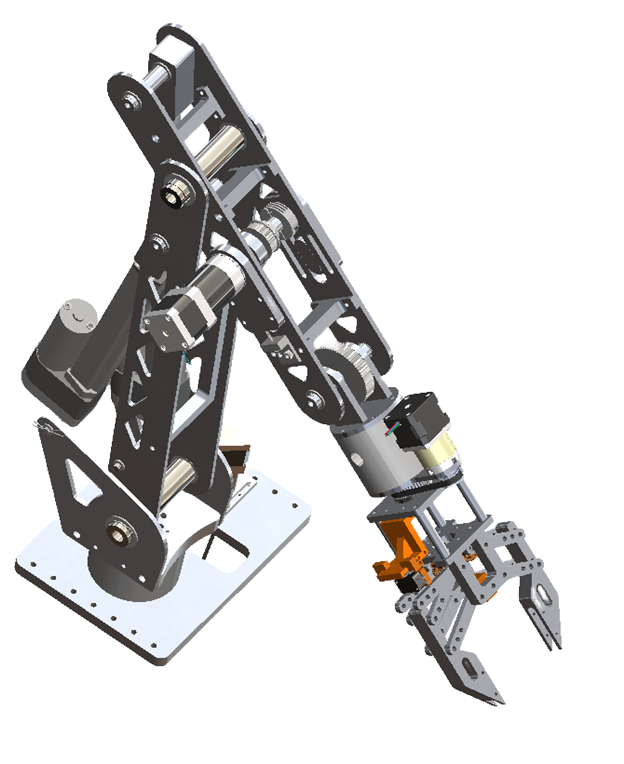
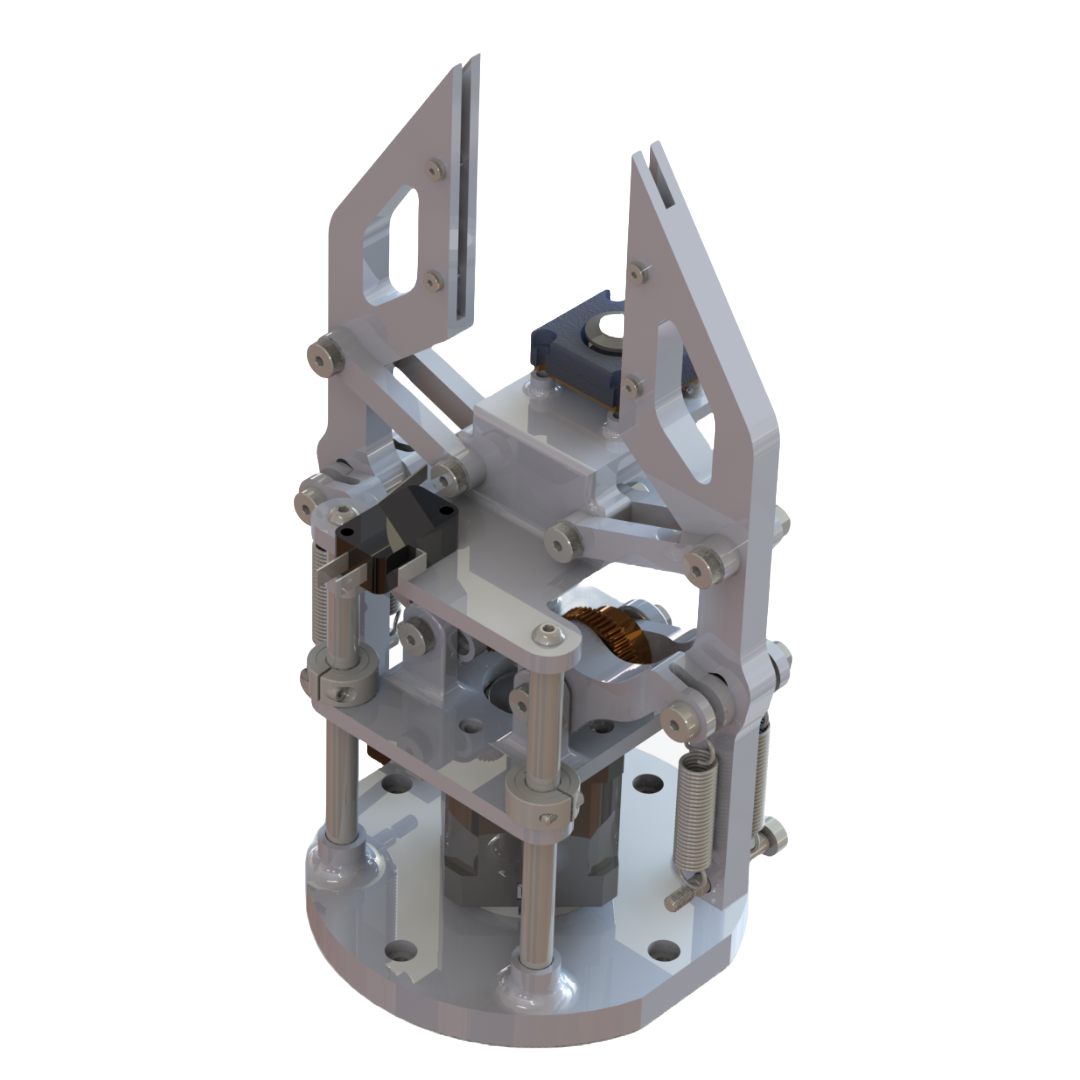

My role within the team was as a design and manufacturing engineer for the robotic arm, with specific focus on improving and optimizing the existing end effector, and preparing the arm design for the future implementation of an inverse kinematic based control system.