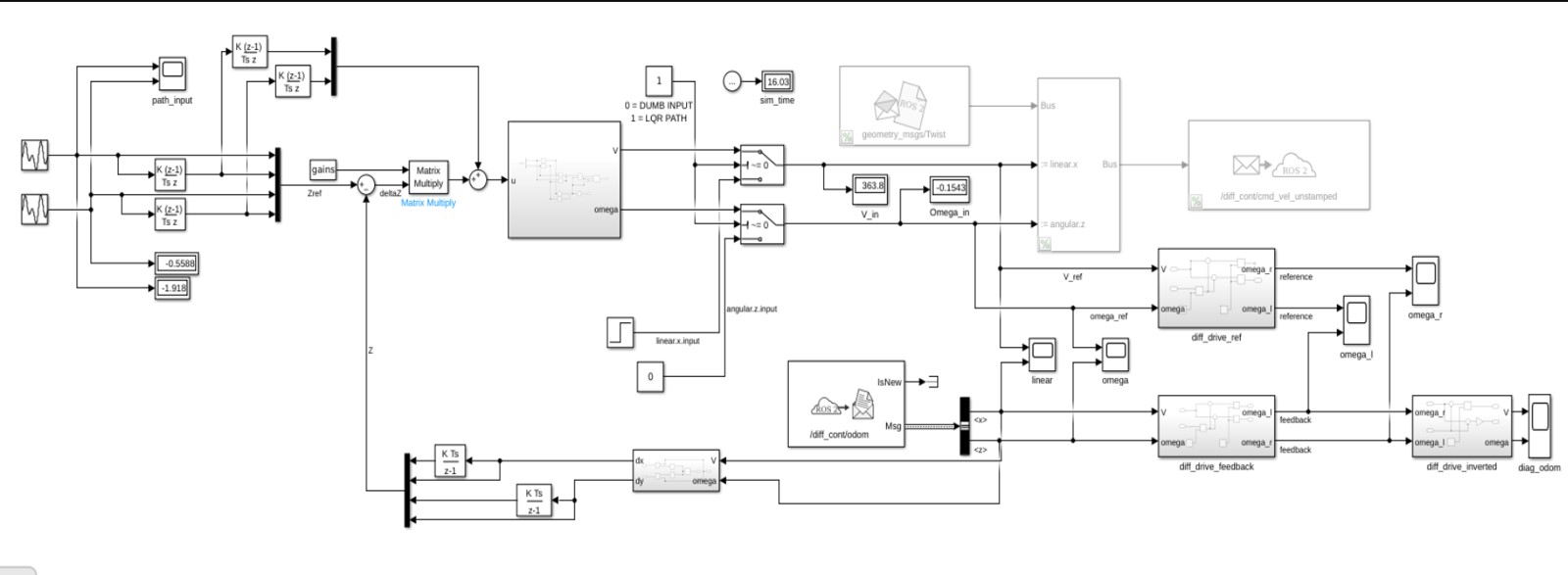
Simplifying assumptions were used to derive reasonable kinematic equations for the physical system, which was then represented mathematically in a linearizable state-space matrix. A control algorithm was develloped using an LQR controller, and then the control algorithm was integrated into the drive system using MATLAB and tested physically.